
Dataset for HD maps — comma2k19
Maps are useful. Accurate maps are even more useful. Building accurate maps requires a lot of data. Mapping vehicles are expensive, EONs are not.
“How can cheap EONs ever make accurate maps?”, you might be thinking. Well, let me show you something:
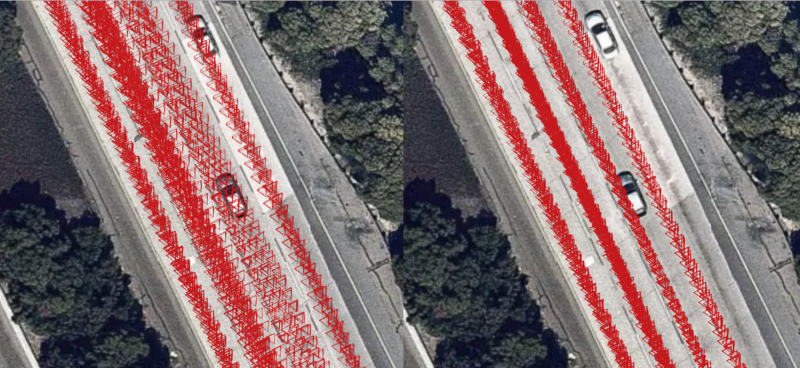
On the right side of the image we see perfectly localized camera poses. This was done by using data collected with EONs and grey pandas. But how? Is it magic? It’s not…. it’s just math, and there’s more good news. We want to help you build accurate maps too, here’s some stuff to help you get started:
- A paper
- 33 hours of driving data: IMU, raw GNSS and video logs
- A Python GNSS processing library: Can provide 40% lower error than live fix
Leave a comment