
Our Road to Self Driving Victory
Right now, every self driving car is Level 2. Waymo, Cruise, comma.ai, Ford, and Tesla all still have drivers in the driver seat. In a Level 2 system, the human must be paying attention and ready to take over at all times. And the liability remains on the driver.
In a Level 3 system, on certain stretches of road, the driver does not have to pay attention. No one is there yet, but this is what the smart companies are pushing toward now. This is what will finally allow you to start to reclaim some of your time spent commuting. And this will make trucking much more efficient, since the time spent with the system engaged will not count toward the driver’s daily hours limit.
comma.ai has written and open sourced a Level 2 system. It is arguably the best one available to the public today.
On certain roads, the comma NEO with openpilot is capable of completely driving, as a handful of YouTube videos will show. But before you take your eyes off the road, remember that it is not superhuman yet. Without your supervision, all self driving systems today are more likely to crash than your average human. But this won’t be the case forever.
Our mission is to build the world’s first superhuman driving agent.
Here is the plan.
1. Get the data. Train a driving model. (done)Permalink
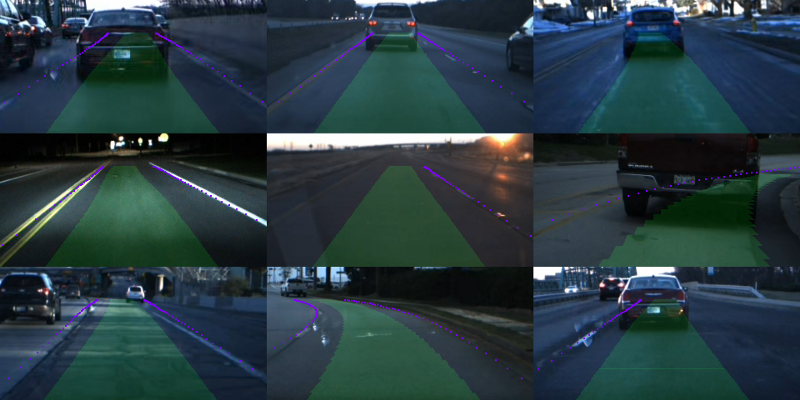
Thanks to openpilot and our chffr users, we have over 1,000,000 miles of data from people driving on real roads all the over the world. We’ve used this data to train perception models and behavioral models of driving. You are teaching us to drive.

We also have an automatic ground truthing engine which doesn’t require us to manually label driving data.
2. Build a way to “drive-by-wire” existing cars. (done)Permalink
Building a car is stupid. The current cars are perfectly good at what they do, they just need to, well, drive themselves. First we build hardware to talk to them.

Everyone knows OBD dongles can read the speed and mess with the climate control and stuff. But on some cars, you can also control the gas, brake, and steering!
Gas: For fuel efficiency purposes, around 2000 most cars became gas by wire. Meaning the gas pedal is just a potentiometer connected to the ECU, and the code on the ECU determines the final throttle and engine torque. Since it’s already completely digital, we can control it.
Brake: In the US, all 2012+ model cars are required to have electronic stability control. This works by applying the brakes when the car detects a loss of traction. Therefore, the braking system needs both electronic valves and a way to build up pressure. Full control.
Steer: Around 2012, manufacturers started shipping cars with electronic power steering instead of hydraulic steering. An electronic power steering system has a ~1 HP motor on the steering rack. With the right software, we can command this motor to turn the wheel.
Most 2012+ cars can be made drive by wire with software mods alone.
3. Own the network. Drive down disengagements. (where we are now)Permalink
We get in hundreds of disengagements per day. With them, we get the full video and log of all car sensors. So we can replay the incident, and investigate what caused the issue.
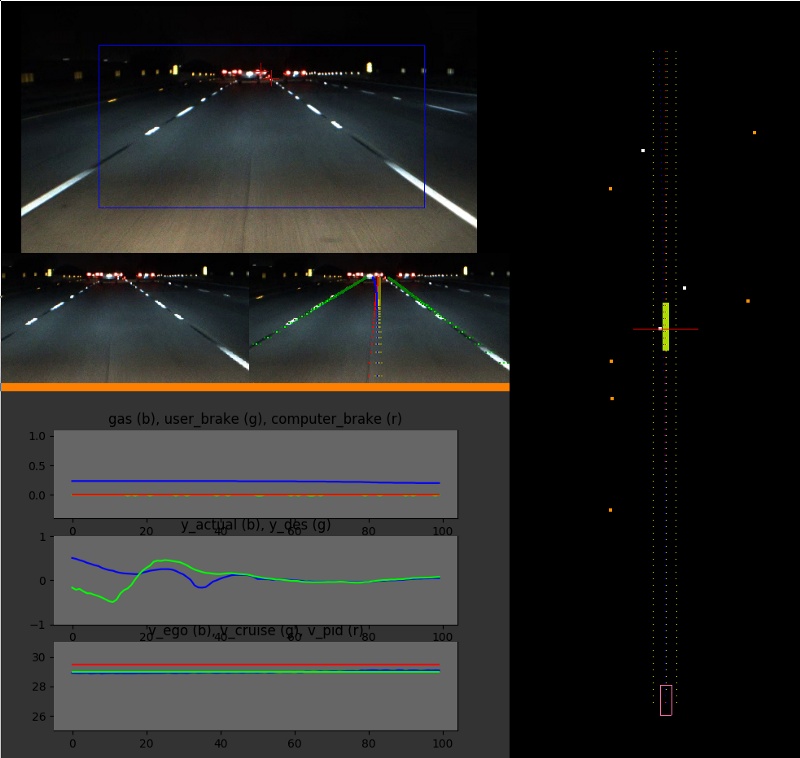
This is how we view the disengagements. And this disengagement review process is becoming more and more automated. Some of these events are also used for regression tests.
We currently have the third largest network in the world after Tesla and Waymo. Shooting for second by the end of the year. Joining the comma network is much cheaper than buying a Tesla, and much much cheaper than it costs Waymo to add a car and pay a safety driver.
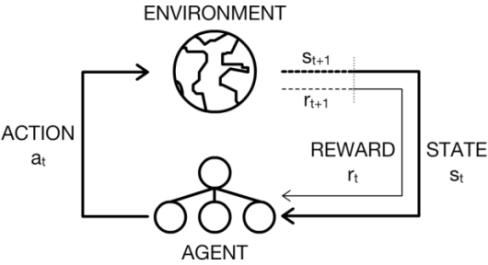
Ownership of the network, and being able to push code to real users, is how we are going to win. We are closing the reinforcement learning loop on a grand scale, and this is what will push our model to superhuman. We will start to publish some technical details about how this works as our victory nears. We have already hinted at it.
4. Show statistically that for certain stretches of road that openpilot is safer than a human.Permalink
Every day, people are out driving their car with openpilot. We know every mistake openpilot makes and how often it makes them. With chffr, we know the exact same thing about humans. Once we can show the system is less likely to make a mistake than a human, we are ready to move on to step 5.
5. Get an insurance company to underwrite a policyPermalink
If we did step 4 well, step 5 is easy. Insurance companies are willing to insure human drivers, so of course they’ll insure an AI driver that’s shown to be safer. Especially with the added data they’d get about any incidents. The system is a way better black box than anything the insurance companies currently have.
6. Ship the worlds first self driving cars you can sleep in (level 3)Permalink

Finally time to claim your time back! The business model will be simple. One, an upfront hardware cost. Due to us avoiding exotic technologies like LIDAR and RTK GPS, this cost will be low. Let’s say under $5,000. And it will be installed on your existing car.
Two, a monthly subscription fee to the comma network. But before you balk at a monthly cost, realize you already have one in the cost of car insurance. The idea would be to replace your car insurance with something cheaper. Because it’s less likely to crash, the premium will be lower.
7. Increase the number of supported roads (level 4/5)Permalink
As we get more users, and with them more training data, our models will become better and better. Better models will be superhuman on more and more roads. Once we have all the roads, we win.
Get the data. Own the network. Win self driving cars.
How to get involvedPermalink
- Follow us on Twitter to watch this industry play out. It’ll be fun.
- Join the comma.ai network by downloading chffr.
- If you have skills, come work here.
Leave a comment